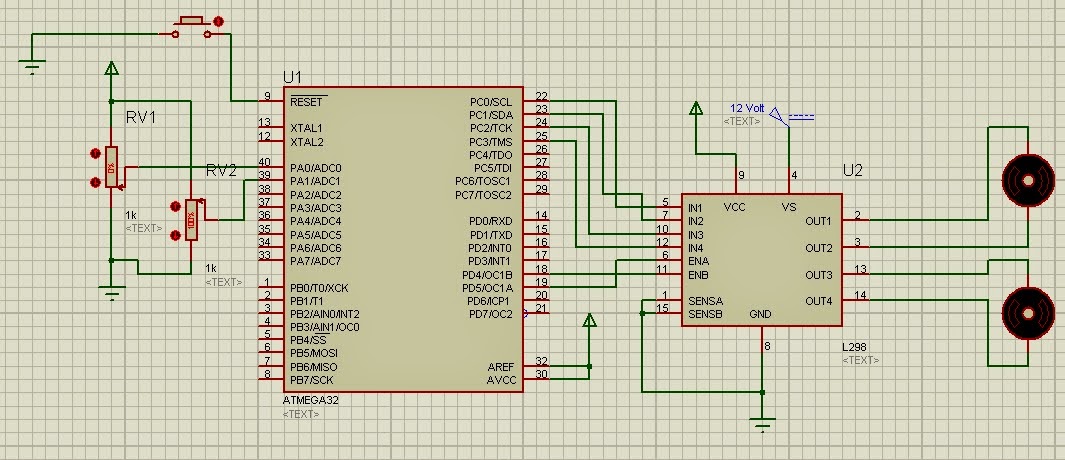
pada skema di atas saya menggunakan mikrokontroler atmega 32, nah setelah teman2 telah membuat rangkaiannya di proteus...!! selanjutnya double click pada mikrokontroler tersebut sehingga akan muncul tampilan seperti berikut :

lakukan konfigurasi seperti ditunjukkan pada gambar di atas, setelah itu klick ok. Nah langkah selanjutnya adalah kita akan membuat source code untuk program mikrokontroler. Disini kami menggunakan aplikasi compile CAVR. Selanjutnya adalah jalankan aplikasi CAVR dan lakukan settingan seperti berikut :

setelah selesai, nah selanjutnya teman-teman tinggal menyamakan program yang ada ya....berikut contoh program yang telah ada :
/*****************************************************
Chip type
: ATmega32
Program type
: Application
AVR Core Clock frequency: 12.000000 MHz
Memory model
: Small
External RAM size
: 0
Data Stack size : 512
*****************************************************/
#include <mega32.h>
#include <delay.h>
#define ADC_VREF_TYPE 0x60
// Read the 8 most significant bits
// of the AD conversion result
unsigned char data1,data2;
//deklarasi variabel
unsigned char read_adc(unsigned char adc_input)
{
ADMUX=adc_input | (ADC_VREF_TYPE & 0xff);
// Delay needed for the stabilization of the ADC input
voltage
delay_us(10);
// Start the AD conversion
ADCSRA|=0x40;
// Wait for the AD conversion to complete
while ((ADCSRA & 0x10)==0);
ADCSRA|=0x10;
return ADCH;
}
// Declare your global variables here
void pot1(unsigned char motor_1) //pengenal untuk potensio 1
{
OCR1A=motor_1;
PORTC.0=0;
PORTC.1=1;
}
void pot2(unsigned char motor_2) // //pengenal untuk potensio 1
{
OCR1B=motor_2;
PORTC.2=0;
PORTC.3=1;
}
void main(void)
{
// Declare your local variables here
// Input/Output Ports initialization
// Port A initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In
Func1=In Func0=In
// State7=T State6=T State5=T State4=T State3=T State2=T
State1=T State0=T
PORTA=0x00;
DDRA=0x00;
// Port B initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In
Func1=In Func0=In
// State7=T State6=T State5=T State4=T State3=T State2=T State1=T
State0=T
PORTB=0x00;
DDRB=0x00;
// Port C initialization
// Func7=In Func6=In Func5=In Func4=In Func3=Out Func2=Out
Func1=Out Func0=Out
// State7=T State6=T State5=T State4=T State3=0 State2=0
State1=0 State0=0
PORTC=0x00;
DDRC=0x0F;
// Port D initialization
// Func7=In Func6=In Func5=Out Func4=Out Func3=In Func2=In
Func1=In Func0=In
// State7=T State6=T State5=0 State4=0 State3=T State2=T
State1=T State0=T
PORTD=0x00;
DDRD=0x30;
// Timer/Counter 0 initialization
// Clock source: System Clock
// Clock value: Timer 0 Stopped
// Mode: Normal top=0xFF
// OC0 output: Disconnected
TCCR0=0x00;
TCNT0=0x00;
OCR0=0x00;
// Timer/Counter 1 initialization
// Clock source: System Clock
// Clock value: 11.719 kHz
// Mode: Fast PWM top=0x00FF
// OC1A output: Non-Inv.
// OC1B output: Non-Inv.
// Noise Canceler: Off
// Input Capture on Falling Edge
// Timer1 Overflow Interrupt: Off
// Input Capture Interrupt: Off
// Compare A Match Interrupt: Off
// Compare B Match Interrupt: Off
TCCR1A=0xA1;
TCCR1B=0x0D;
TCNT1H=0x00;
TCNT1L=0x00;
ICR1H=0x00;
ICR1L=0x00;
OCR1AH=0x00;
OCR1AL=0x00;
OCR1BH=0x00;
OCR1BL=0x00;
// Timer/Counter 2 initialization
// Clock source: System Clock
// Clock value: Timer2 Stopped
// Mode: Normal top=0xFF
// OC2 output: Disconnected
ASSR=0x00;
TCCR2=0x00;
TCNT2=0x00;
OCR2=0x00;
// External Interrupt(s) initialization
// INT0: Off
// INT1: Off
// INT2: Off
MCUCR=0x00;
MCUCSR=0x00;
// Timer(s)/Counter(s) Interrupt(s) initialization
TIMSK=0x00;
// USART initialization
// USART disabled
UCSRB=0x00;
// Analog Comparator initialization
// Analog Comparator: Off
// Analog Comparator Input Capture by Timer/Counter 1: Off
ACSR=0x80;
SFIOR=0x00;
// ADC initialization
// ADC Clock frequency: 93.750 kHz
// ADC Voltage Reference: AVCC pin
// Only the 8 most significant bits of
// the AD conversion result are used
ADMUX=ADC_VREF_TYPE & 0xff;
ADCSRA=0x87;
// SPI initialization
// SPI disabled
SPCR=0x00;
// TWI initialization
// TWI disabled
TWCR=0x00;
while (1)
{
data1=read_adc(0); // variabel
data1 akan membaca nilai adc yang berada pada PINA.0
pot1(data1); // void pot1 menerima nilai yang ada pada
variabel nilai_ADC1
data2=read_adc(1); // variabel
data1 akan membaca nilai adc yang berada pada PINA.0
pot2(data2); // void pot1 menerima nilai yang ada pada
variabel nilai_ADC1
}
}
/***********************************************************************/
selamat mencoba, semoga sukses selalu...!






